Driving a DFRobot 3-Wire LED module from a Raspberry Pi
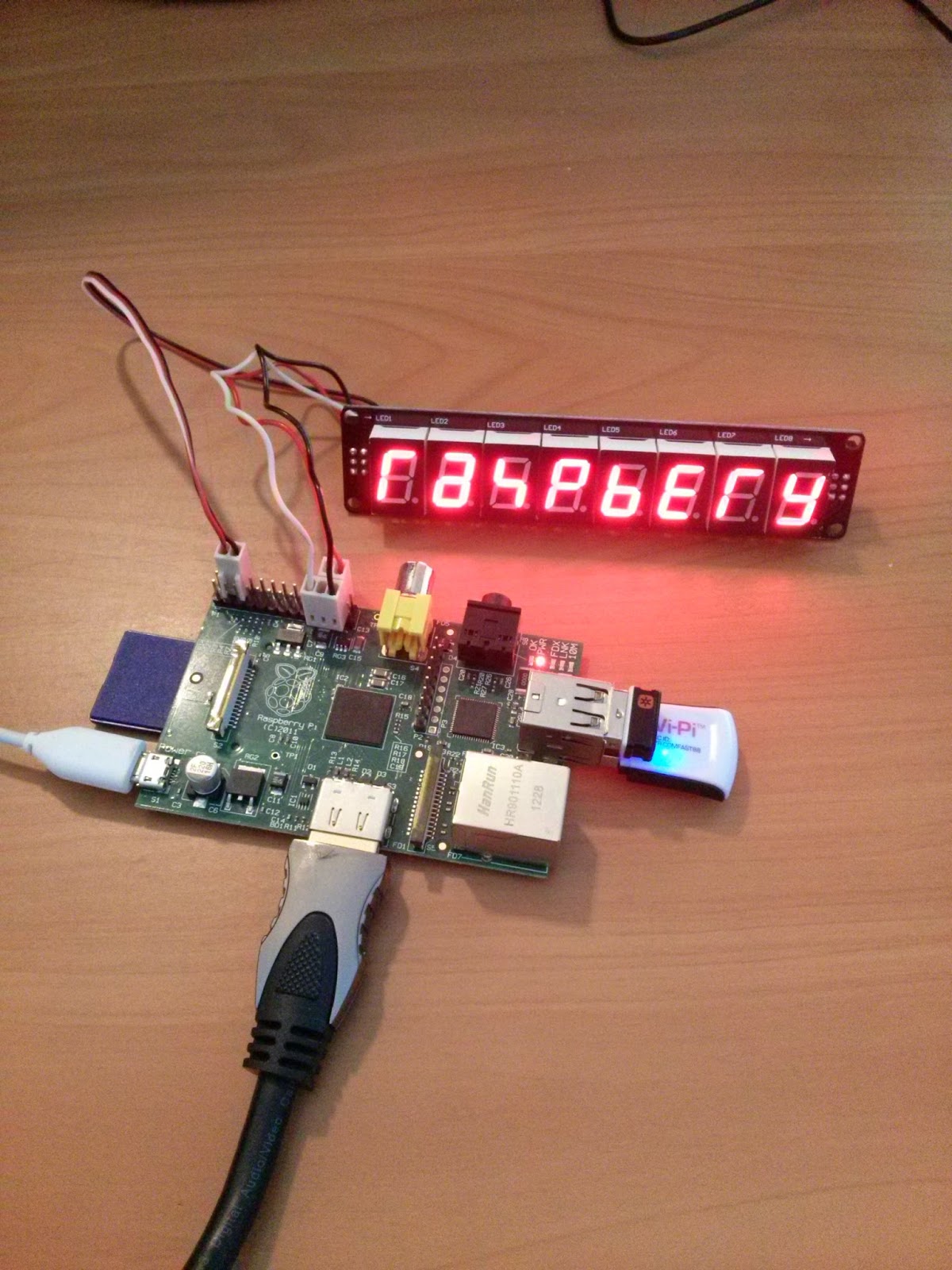
Here's some very simple test code that you can use to drive one of these LED modules from a Raspberry Pi:
(The misspelling was intentional, I figured "Raspbery" looked better than "Raspberr" :D)