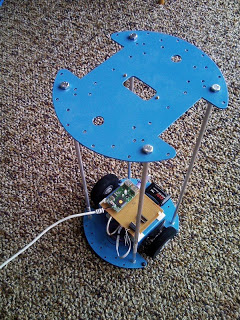
Here it is in its current state (click to enlarge).
The height extension was courtesy of 450mm lengths of hollow aluminium tube, with 5mm bolts tapped into the ends.
This is the 75% completed motor controller system. This will interface via the white (USB) lead to the mini PC. More info on the USB IO interface to follow (the purple plug should give it away).
All that is needed for completion is creation of the "high-level" motor control - currently the PC can only turn on or off the left or right motor. The goal is to have the PC output one of six discrete commands
-left-on-spot
-left-around-right-wheel
-forward
-reverse
-right-on-spot,
-right-around-left-wheel.
This will be accomplished with a mass of diodes heading into the H-Bridge :D





{kind=link}